DINÂMICA DE CORPOS RÍGIDOS U4 - SEÇÃO 1 U4 S1 - ATIVIDADE DIAGNÓSTICA
1) Leia atentamente a afirmativa a seguir.
Para descrever uma rotação intrínseca podemos usar um formalismo chamado ângulos de:
I - Euler.
II - Tait-Bryan.
III - Bose-Einstein.
Avalie quais das alternativas representam os nomes corretos de formalismos para a descrição de rotações intrínsecas.
Escolha uma:

II - Um referencial no espaço que apresenta uma velocidade de translação constante e uma velocidade de rotação constante é um referencial inercial
III - Se um referencial em movimento de translação no espaço é acelerado em apenas um eixo, ele pode ser considerado um referencial inercial no plano perpendicular a aceleração (ou seja, nas outras duas coordenadas).
Leia com cuidado as três afirmativas anteriores, e assinale qual alternativa é a correta.
Escolha uma:

II - Uma rotação no espaço tridimensional é semelhante a uma rotação no plano, pode ser descrita por um único ângulo.
III - Para um movimento geral no espaço precisamos adicionar uma dimensão pra translação e rotação. Logo teremos três coordenadas para translação e duas para rotação.
Leia com cuidado as três afirmativas anteriores, e assinale qual alternativa é a correta.
Escolha uma:
DINÂMICA DE CORPOS RÍGIDOS U4 - SEÇÃO 1 U4 S1 - ATIVIDADE DE APRENDIZAGEM
1) Um determinado corpo rígido executa uma rotação que se descrita pela convenção do tipo Z- X - Z tem os ângulos de Euler descritos pelas relações: Ψ = 5t em graus, Θ = 2t em graus e φ = 10 em graus. Qual o vetor velocidade angular deste movimento de rotação?
Selecione das alternativas abaixo a que melhor representa a sua resposta.
Selecione nas alternativas aquela que apresenta apenas rotações que seguem a convenção dos ângulos de Euler.
Escolha uma:

Marque a alternativa que indica o número máximo de rotações planas necessário para compor uma rotação qualquer ao redor de um ponto.
Escolha uma:
DINÂMICA DE CORPOS RÍGIDOS U4 - SEÇÃO 2 U4 S2 - ATIVIDADE DIAGNÓSTICA
1) I - A distribuição de massa de um corpo rígido tridimensional determina uma grandeza chamada tensor de inércia, que é um extensão do momento de inércia para rotações sobre o plano, e que permite a análise de rotações tridimensionais.
II - O momento angular no espaço tridimensional deve ser descrito por três equações escalares independentes.
III - O momento linear no espaço tridimensional deve ser descrito por três equações escalares independentes.
Leia com cuidado as três afirmativas anteriores, e assinale qual alternativa é a correta.
Escolha uma:
II - A energia cinética de translação de um corpo rígido sempre vai variar quando estiver sob a ação de uma força resultante não nula.
III - A energia cinética de um corpo rígido está relacionada com o quadrado da velocidade angular nos três eixos e também com o quadrado da velocidade linear do centro de massa.
Leia com cuidado as três afirmativas anteriores, e assinale qual alternativa é a correta.
Escolha uma:
II - O princípio do trabalho e conservação de energia se aplica ao espaço tridimensional, uma vez que a translação e a rotação são analisadas de forma independente.
III - O princípio de impulso e quantidade de movimento linear se aplica ao espaço tridimensional somente se o corpo rígido não estiver executando um movimento de rotação.
Leia com cuidado as três afirmativas anteriores, e assinale qual alternativa é a correta.
Escolha uma:

DINÂMICA DE CORPOS RÍGIDOS U4 - SEÇÃO 2 U4 S2 - ATIVIDADE DE APRENDIZAGEM
1) A placa fina uniforme tem uma massa de m=10Kg. No instante mostrado na figura ela está na iminência de enganchar seu canto A num gancho e se move a uma velocidade VG=10m/s= 10 m/s. Determine sua velocidade angular logo após o canto A acertar o gancho.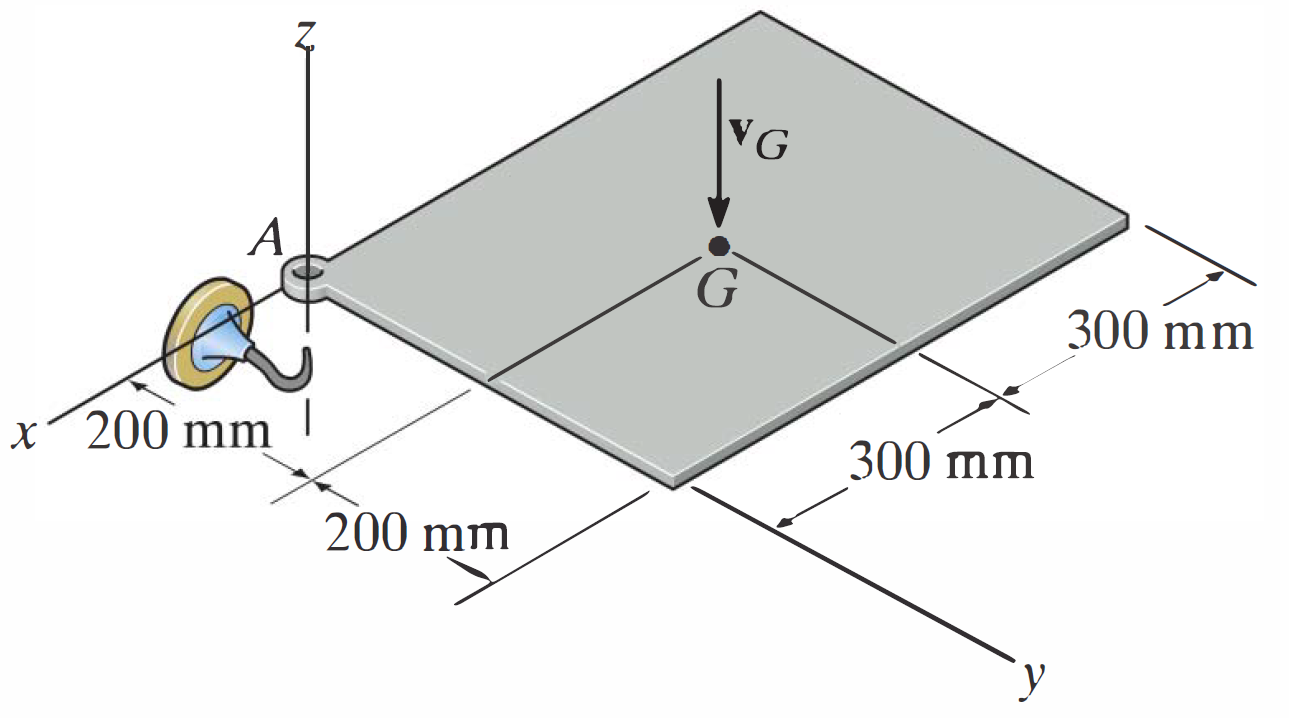
Selecione nas alternativas abaixo a que melhor representa sua resposta.
Escolha uma:


Selecione nas alternativas abaixo a que melhor representa sua resposta.
Escolha uma:
I - A energia cinética de um corpo rígido no espaço tridimensional é composta pela energia cinética de translação e pela energia cinética de rotação, cada uma composta por pelo menos três componentes independentes.
II - A quantidade de movimento linear ou angular de um corpo rígido irá se conservar exceto na presença de uma força ou torque.
III - A velocidade angular de um movimento de rotação ao redor de um ponto pode ser descrita como um vetor tridimensional.
Leia com cuidado as três afirmativas anteriores, e assinale a alternativa que indica todas as afirmativas corretas.
Escolha uma:

DINÂMICA DE CORPOS RÍGIDOS U4 - SEÇÃO 3 U4 S3 - ATIVIDADE DIAGNÓSTICA
1) Leia atentamente as afirmativas a seguir:
I - Para translação em três dimensões, as forças que agem sobre um corpo rígido no plano podem ser analisadas por meio de três equações escalares independentes.
II - Para descrever a posição do centro de massa de um corpo rígido em um problema tridimensional, precisamos de um vetor tridimensional, e nesse caso podemos fazer uso dos versores I, J e K.
III - Um corpo rígido no espaço tridimensional pode estar sujeito a ação de apenas três forças.
Assinale a alternativa correta, com relação às afirmativas indicadas.
Escolha uma:
II - Um exemplo de corpos rígidos livres de torque é o de um satélite, pois ele está em um ambiente sem gravidade.
III - Um corpo livre de torques sempre conserva momento angular.
Leia com cuidado as três afirmativas anteriores, e assinale qual alternativa é a correta.
Escolha uma:

II - Uma rotação no espaço tridimensional sempre pode ser construída com base em em três rotações planas.
III - Um corpo livre no espaço tridimensional pode estar sujeito a ação de apenas três torques.
Leia com cuidado as três afirmativas anteriores, e assinale qual alternativa é a correta.
Escolha uma:
DINÂMICA DE CORPOS RÍGIDOS U4 - SEÇÃO 3 U4 S3 - ATIVIDADE DE APRENDIZAGEM
1) Um pião de 3KG está preso por uma junta esférica que não oferece atrito, como mostrado na figura. Sabendo que o raio de giro entorno do eixo de simetria do pião pode ser aproximado ao de um cone. Determine qual a velocidade de precessão WP que faz com que o pião precessa a um ângulo de ângulo=45º ao mesmo tempo que o momento de inércia entorno do eixo transversal é o dobro do momento de inércia do eixo de simetria e sua velocidade de rotação é de WS=5000rad/s. Considere que o centro de massa do pião também pode ser aproximado pelo de um cone.
Selecione dentre as alternativas abaixo a que melhor represente a sua resposta
Escolha uma:

Determine as componentes da reação que o mancal axial A e o mancal radial B exercem sobre o eixo no instante mostrado, e marque a alternativa que melhor representa os valores corretos.
Escolha uma:

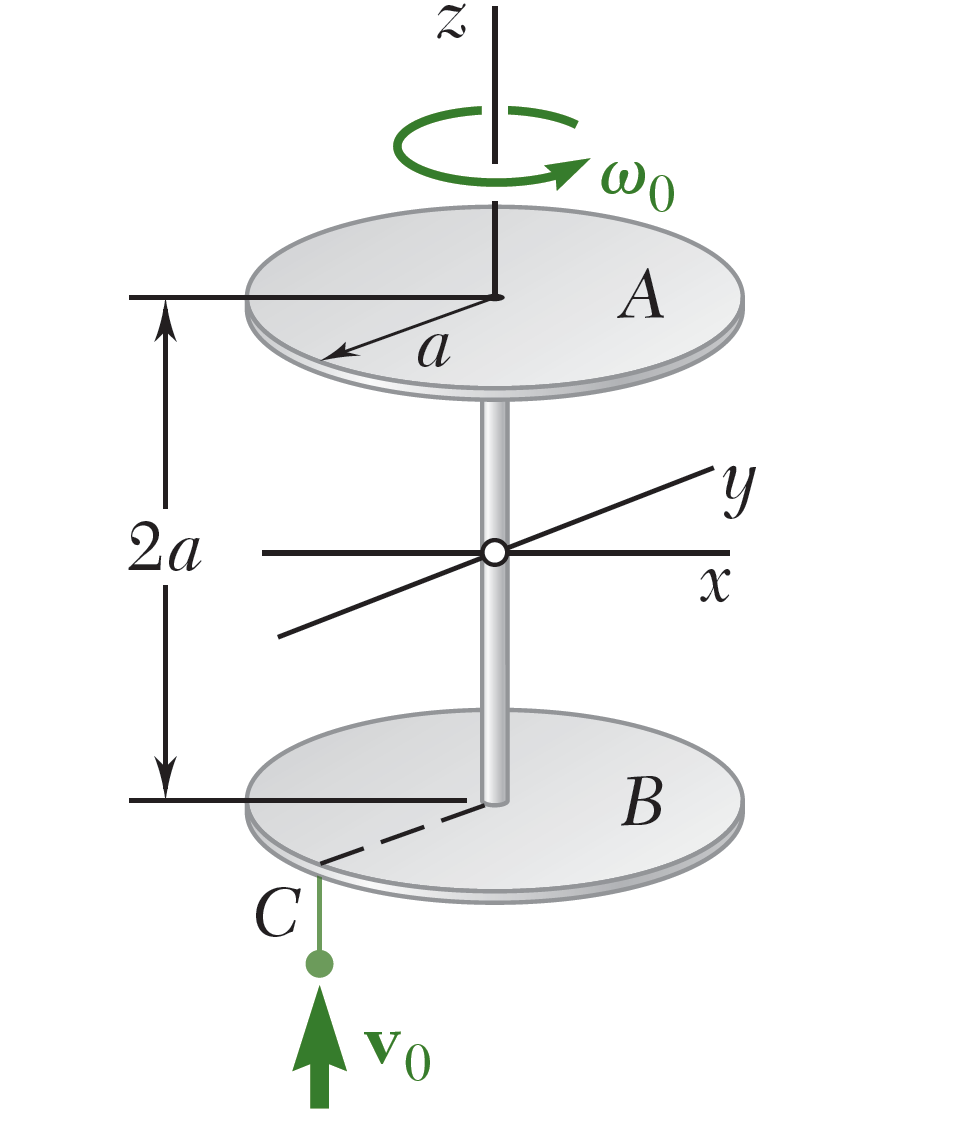
F. Beer, Mecânica Vetorial para engenheiros: Dinâmica, 9ª edição, Porto Alegre, AMGH Editora Ltda, 2009.
Considere os momentos de inércia (figura em anexo).
Determine a magnitude da nova velocidade angular do satélite imediatamente após o impacto, e selecione a alternativa que melhor representa a resposta correta.

DINÂMICA DE CORPOS RÍGIDOS U4 - SEÇÃO 3 U4 - AVALIAÇÃO DA UNIDADE
1) Calcule o efeito de uma rotação entorno do eixo x sobre um vetor que inicialmente estava na direção descrita pela relação r=10i+2K . Além do eixo de rotação mencionado considere que o ângulo da rotação é de ALPHA=90.
Selecione nas alternativas abaixo a que melhor representa a sua resposta.
Escolha uma:
2) Um disco homogêneo ilustrado na figura abaixo que possui uma massa m equals 2 space k g e gira à taxa constante numa velocidade angular omega subscript 2 equals 10 space r a d divided by s em relação ao braço A B C, que por sua vez gira à taxa constante numa velocidade angular omega subscript 1 equals 3 space r a d divided by s em relação ao eixo y. O disco possui um raio r equals 200 space m m. Despreze a massa do braço A B C. Dado: momento de inércia de um disco: I subscript z equals fraction numerator m r squared over denominator 2 end fraction ; I subscript x equals I subscript y equals fraction numerator m r squared over denominator 4 end fraction.
Calcule a energia cinética do sistema, e marque a alternativa que contém seu valor correto.
Escolha uma:
3) Na figura ilustrada abaixo que é composto por um sistema de disco e eixo, temos que o disco é homogêneo e possui uma massa m=3KG e gira à uma taxa constante W1=16 rad/s em relação ao braço ABC, que se encontra soldado ao eixo DCE que gira à taxa constante W2=8rad/s . O disco possui um raio r=200mm .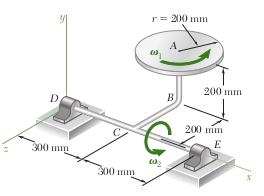
Determine a quantidade de movimento angular Ha do disco em relação a seu centro A e marque a alternativa que contém o valor correto.
Escolha uma:
4) Um braço robótico segue a convenção X-Y-Z para rotações intrínsecas. Calcule a matriz de rotação seguindo esta convenção considerando que os ângulos de Tait-Bryan da primeira rotação tem um ângulo de 30º, o da segunda tem um ângulo de 45º e da última um ângulo de 60º.
Selecione dentre as alternativas abaixo, a resposta que indica a matriz de rotação correta para o caso indicado.
Escolha uma: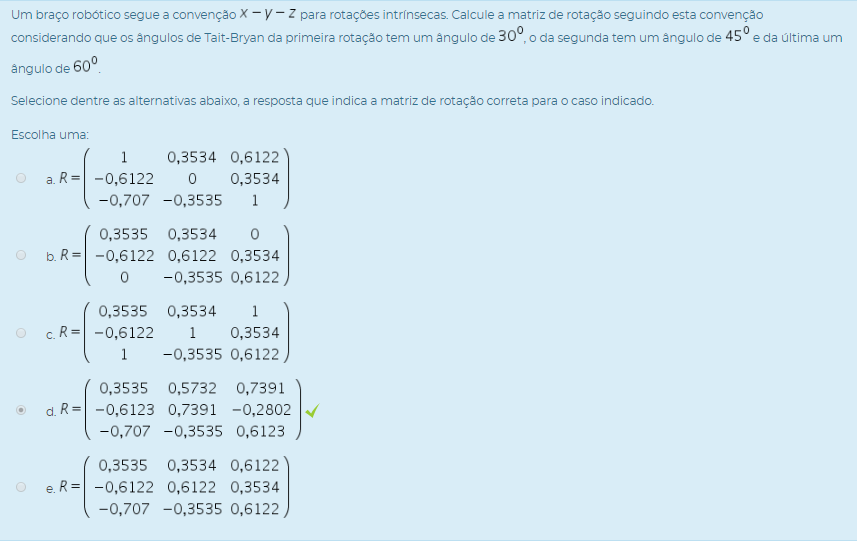
5) O primeiro satélite lançado pelo homem denominado Sputnik 1 era uma esfera metálica de raio R=58cm com quatro antenas externas, e que ao todo pesava 83,6KG. Logo depois de seu lançamento foi possível observar que seu momento angular era bastante alto. É importante notar que um satélite se comporta como um ______, e que sua rotação no espaço é bem descrita, na convenção dos ângulos de _____, por três ângulos, chamados _____, ______, _____.
Marque a alternativa que completa corretamente as lacunas do texto acima
Escolha uma: