
Dinâmica de Corpos Rígidos /U1 - Seção 1 /U1S1 - Atividade Diagnóstica
1) Em física podemos representar as grandezas como escalar e vetorial. As grandezas escalares precisam apenas de seu valor para ser determinadas, como por exemplo, a massa de corpos rígidos. Já grandezas vetoriais precisam de três características para serem descritas de maneira completa.
Marque a alternativa correta que contenha as três características necessárias para determinar e descrever completamente uma grandeza vetorial.
Escolha uma:
a. intensidade, direção, sentido
b. aceleração, velocidade, posição
c. momento, velocidade, direção
d. potência, energia, trabalho
e. momento, energia, trabalho
Calcule o módulo do vetor e marque a alternativa correta.
Escolha uma:
a. 5 km
b. 9 km
c. 10 km
d. 16 km
e. 25 km

I) De posse do vetor posição de um ponto do corpo rígido como função do tempo, podemos obter a velocidade desse ponto através da derivada da posição em relação ao tempo.
II) Corpos rígidos são extensos, dotados de infinitos pontos. É importante que um engenheiro seja capaz de selecionar alguns pontos de interesse e descrever seu movimento em termos de posição, velocidade e aceleração, para ser capaz de projetar mecanismos eficientes.
III) Um ponto em um corpo rígido que gira com velocidade angular constante ao redor de um eixo de rotação, a uma distância R deste, possui o módulo da velocidade tangencial dada pela relação V=W.R.
Marque a seguir a alternativa que contém apenas as afirmativas verdadeiras:
Escolha uma:
a. I.
b. III.
c. I, II e III.
d. I e II.
e. I e III.

Dinâmica de Corpos Rígidos /U1 - Seção 1 /U1S1 - Atividade de Aprendizagem
Calcule a posição do ponto em coordenadas cilíndricas, e selecione a alternativa que o indica corretamente.
Escolha uma:
a.(5,arctan(4/3),5)
b. (5,arctan(4/3),1)
c. (1,arctan(3/4),5)
d.(5,arctan(3/4),1)
e.(1,arctan(4/3),5)
Selecione a alternativa que contém o vetor velocidade (tangencial) do ponto B na extremidade do corpo rígido.
Escolha uma:
a. (1;1;-1)
b.(-2;-1;3)
c.(3;-3;0)
d.(4;3;1)
e.(-3;4;5)
Calcule a posição do sensor em coordenadas polares, considerando que as origens de ambos os sistemas de coordenadas coincidem. Selecione a alternativa que indica corretamente a posição calculada.
Escolha uma:
a.(3,arctan(4/3))
b.(4,arctan(4/3))
c. (5,arctan(3/4))
d. (4,arctan(3/4))
e.(5,arctan(4/3))

Se at for o módulo da componente tangencial, e an for o módulo da componente normal da aceleração, selecione a alternativa que representa o módulo da aceleração total.
Escolha uma:

Calcule o módulo da velocidade da parte móvel do dispositivo, no instante t=1s. Assinale a alternativa correta.
Escolha uma:

alpha(t)=30.t²
A unidade da aceleração está no SI.
Calcule o valor da aceleração angular para o instante t=2s. Assinale a alternativa correta.
Escolha uma:
DINÂMICA DE CORPOS RÍGIDOS U1 - SEÇÃO 2 U1 S2 - ATIVIDADE DE APRENDIZAGEM
1) Um engenheiro precisa fazer análises em um sistema mecânico, em uma indústria de automação, onde trabalha. Verificando uma das partes móveis de um dispositivo, o engenheiro calcula que a velocidade de um ponto do corpo rígido é dada pela seguinte função vetorial:
V(t)=eti, em unidades do SI.
A partir da velocidade, determine o módulo da aceleração de um ponto do corpo rígido, para o instante  em unidades do SI.
em unidades do SI.
Escolha uma:

R(t)=3.sen(t)i+4.cos(t)i.
A partir de considerações geométricas, e da função posição dada no relatório, selecione a alternativa que descreve qual a trajetória do ponto no corpo rígido.
Escolha uma:
A partir de considerações geométricas, e da função posição dada no relatório, selecione a alternativa que descreve qual a trajetória do corpo rígido.
Escolha uma:
DINÂMICA DE CORPOS RÍGIDOS U1 - SEÇÃO 3 U1 S3 - ATIVIDADE DIAGNÓSTICA
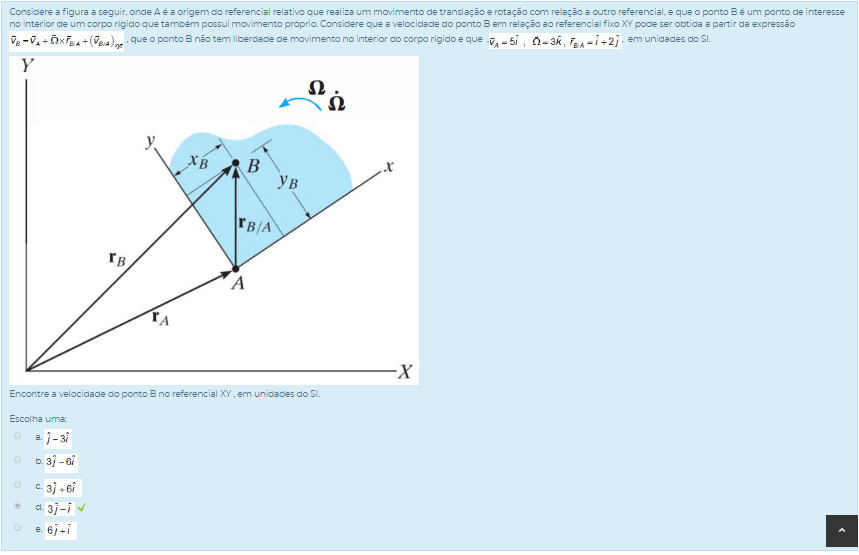
1) Considere a figura a seguir, onde A é a origem do referencial relativo que realiza um movimento de translação e rotação com relação a outro referencial, e que o ponto B é um ponto de interesse no interior de um corpo rígido que também possui movimento próprio. Considere que a velocidade do ponto B em relação ao referencial fixo XY pode ser obtida a partir da expressão  , que o ponto B não tem liberdade de movimento no interior do corpo rígido e que ,
, que o ponto B não tem liberdade de movimento no interior do corpo rígido e que , , em unidades do SI.
, em unidades do SI.
Encontre a velocidade do ponto B no referencial XY , em unidades do SI.
Escolha uma:
I- O movimento planar de um corpo rígido é impossível de se descrever, pois um corpo rígido é composto por infinitos pontos e portanto esse movimento é muito complexo.
II- Um movimento geral de um corpo rígido no plano pode ser dividido em duas componentes principais: um movimento de translação e um movimento de rotação.
III- A análise do movimento planar pode ser simplificada por meio da definição de um referencial relativo que realiza uma translação, e ao redor do qual o corpo rígido gira.
Selecione a alternativa que marca todas as afirmativas corretas entre as sentenças acima
Escolha uma:

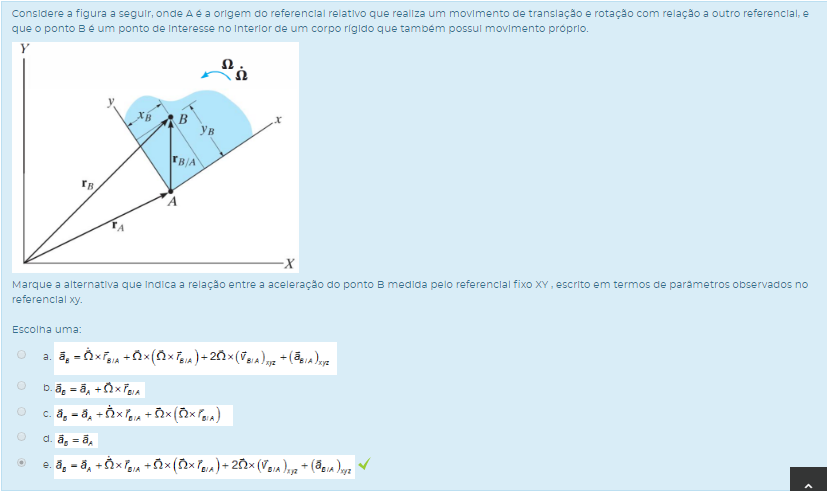
Marque a alternativa que indica a relação entre a aceleração do ponto B medida pelo referencial fixo XY , escrito em termos de parâmetros observados no referencial xy.
Escolha uma:
DINÂMICA DE CORPOS RÍGIDOS U1 - SEÇÃO 3 U1 S3 - ATIVIDADE DE APRENDIZAGEM
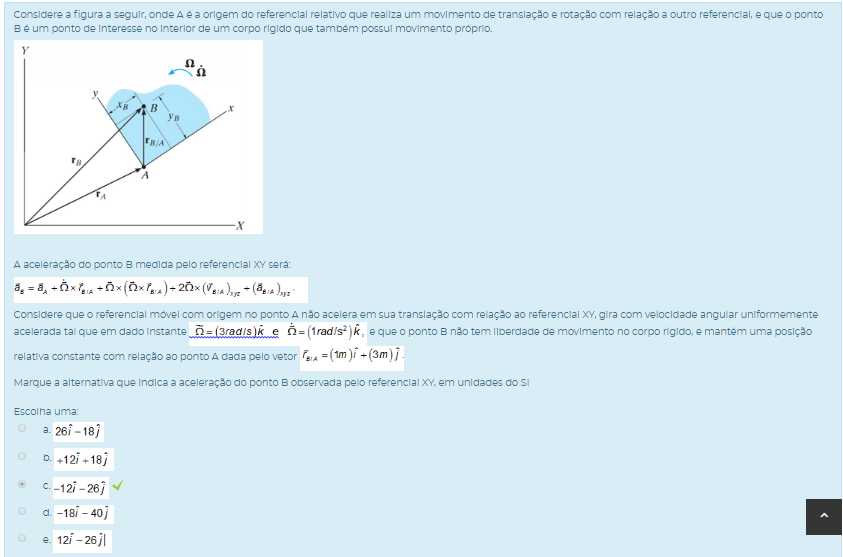
1) Considere a figura a seguir, onde A é a origem do referencial relativo que realiza um movimento de translação e rotação com relação a outro referencial, e que o ponto B é um ponto de interesse no interior de um corpo rígido que também possui movimento próprio.
O __________, ou centro instantâneo de rotação é definido como um ponto fixo (ou referencial) em um corpo rígido, em movimento planar, que possui velocidade _______ em um determinado instante de tempo.
Leia o texto anterior, e assinale a alternativa que completa as lacunas do texto corretamente.
Escolha uma:


Analise as afirmativas indicadas a seguir:
I) Para um observador externo, em repouso sobre a calçada, o único ponto da roda que não se move no instante em questão é o ponto C.
II) O centro da roda, ponto A, tem 75% da velocidade do carro conforme relatado por um observador externo em repouso na calçada.
III) Se definirmos um referencial fixo na posição do ponto C, no instante em questão a velocidade observada para o ponto D é nula.
Marque a alternativa que indica todas as afirmativas corretas
Escolha uma:
DINÂMICA DE CORPOS RÍGIDOS U1 - SEÇÃO 3 U1 - AVALIAÇÃO DA UNIDADE
1) Um determinado corpo rígido em formato de disco, descreve movimento circular, preso em um ponto fixo, e um ponto afastado de seu centro, próximo a borda possui sua aceleração angular alpha(t) dada pela seguinte função do tempo:
alpha(t) = 10.cos(t)
Calcule a velocidade angular do corpo rígido, considerando que inicialmente ela era 1rad/s, e selecione a alternativa correta.
Escolha uma:
Selecione a alternativa que contém o vetor aceleração normal do ponto A no interior do corpo rígido.
Escolha uma:

Selecione a alternativa que contém o vetor velocidade (tangencial) do corpo rígido.
Escolha uma:
Determine a função posição do ponto de interesse considerando que a partícula parte da origem, e selecione a alternativa correta.
Escolha uma:


Marque a alternativa que contém o vetor velocidade correto, em unidades do SI, e que indica qual o sentido de rotação da barra OA em torno de O.
Escolha uma:








